パソコン:FUJITSU BIBLO MG70M/Tの分解とファン異音対応 [パソコン]
ノートPC「FUJITSU BIBLO MG70M/T」の分解&ファン掃除の投稿をしましたが、その後、ファンの異音がひどくなったので、もう一度、分解&ファンの異音対応を行う事にしました。
以下、参考までに分解方法およびファンの異音対応の概要です。なお、2005年当時の機種なので保証うんぬんの話は気にされないとは思いますが、開けるとメーカー保証対象外となります。
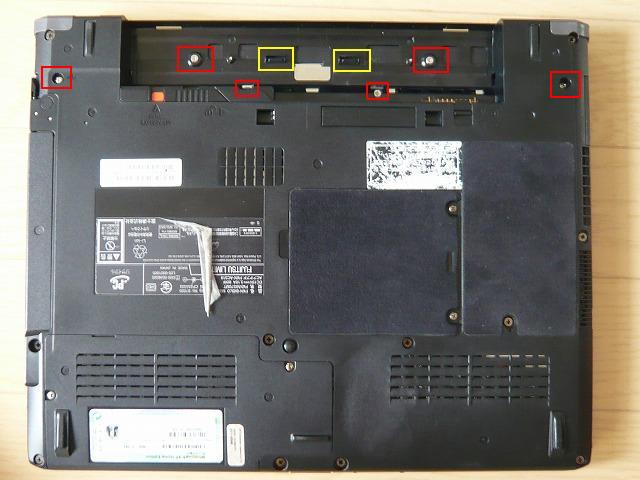
- 裏面のバッテリー外します。
- 以下の赤色部分のねじ(6カ所)を外します。また、黄色の部分の爪を外して浮かせます。
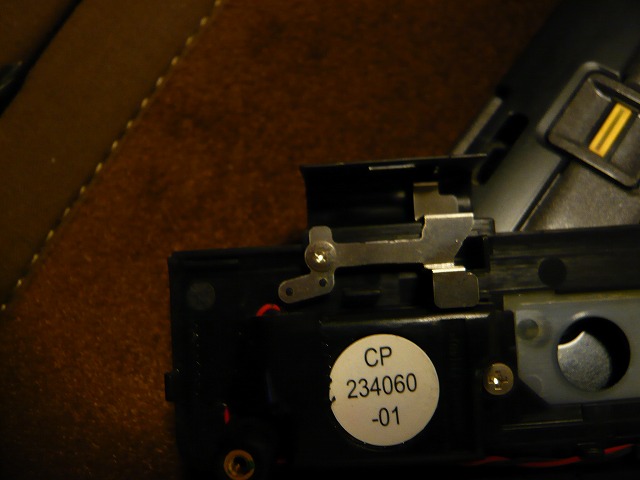
黄色の部分の液晶側の写真です。左側の部分が蓋を閉じた時にスイッチを切るための突起です。液晶を180度まで開くと次の写真の金具に当たらないようなります。
黄色の部分の上側を裏から写した写真です。金具の右側上の部分が上記写真の突起部分の位置です。金具の右上隅がカットされており、液晶を180度開く事で金具に引っかからず外せるようになっています。
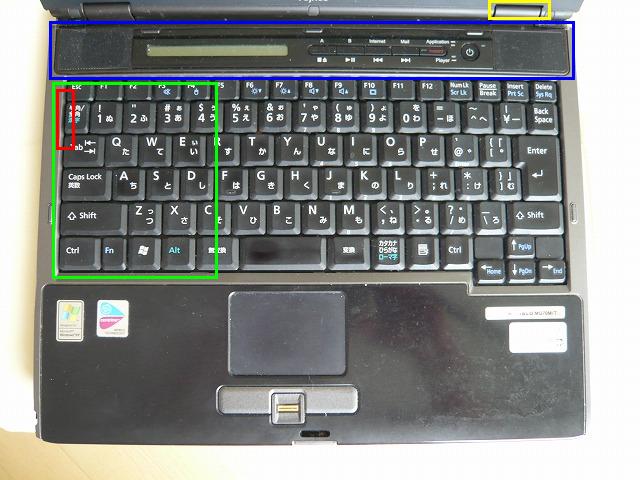
青色部分が外れた状態です。(左側のコネクタは外していません。)
下記の写真はキーボードをはがした状態です。まだ、キーボードのコネクタはついたままです。
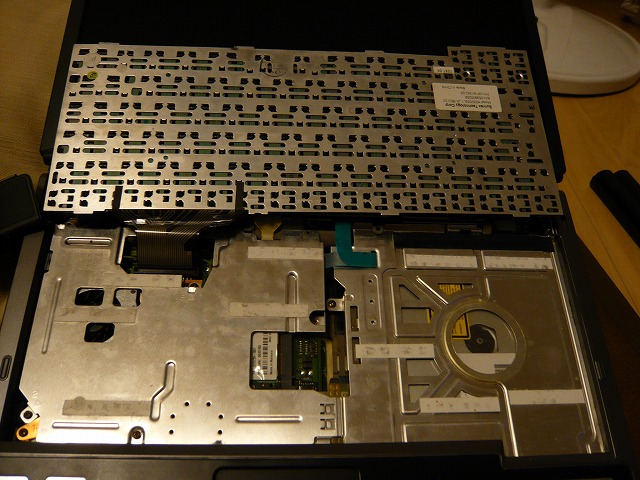
下の写真はキーボード配線を外したコネクタです。上の部分が下の部分から浮いている状態です。
下の写真は修理後の組み上げ途中のものですが、このような状態になります。
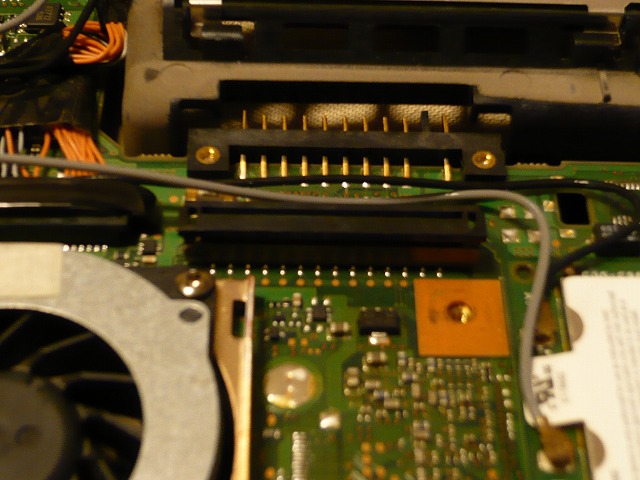
下記の写真は放熱板まで外した状態で吹き出し口を写したものです。ここにホコリがたまります。
下の写真のように放熱板を外すとCPUが見えます(写真は無線LANカードも外した状態です。)。ここまで外すと組み上げ時にCPUと放熱板の接点に隙間ができてしまうので、組み上げ時に熱伝導グリスを塗って組み上げました。
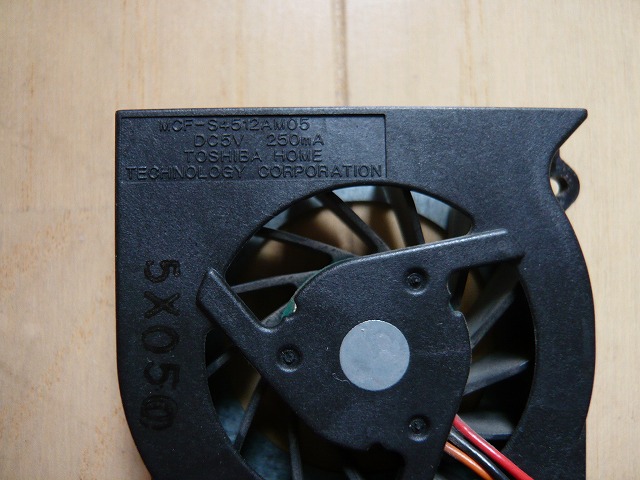
外したファンの写真です。東芝ホームテクノロジー社製です。
下の写真では、上部2カ所をカッターで削りました。(組み上げ時に白色の耐熱テープで金属板を固定しました。)









- ショップ: グラスロードカンパニー
- 価格: 630 円

パソコン:avast!によるシャットダウン障害と2度の入院の関係 [パソコン]
FRNU503ですが、2度目の入院から戻ってきてからも、「シャットダウン時にフリーズ」「起動中にフリーズ」「休止状態に入らない」の症状が続いていました。
この環境では無料のウィルスチェックソフト「avast! Home Edition」を使っています。一度、avast!をアンインストールして使ってみたところ問題が再現しなくなりました。ネットで調べてみると、既知の問題らしく、対応ソフト「avastop」(http://www.geocities.jp/h_mori_sosw/)も出回っている事がわかりました。早速、対応ソフトと併用してavast!を使ってみたところ、今のところ問題は再現しません。
avast!については数年前から使っており、我が家の他の2台のマシンでは全く問題が出ていなかったのでこのような問題があるとは思っていませんでした。そういえば、他の2台のマシンとの違いは、マルチスレッドだと思います。FRNU503のインテルAtom N270は、擬似的に2スレッド(2つのCPU)になっていましたが、他のは1スレッドでした。現象が出る・出ないは、このあたりが影響しているのかなと感じています。
そういえば、2度のマザーボード交換ですが、BIOSロード中にハングするようになったのは、上記シャットダウン障害調査中にBIOSの設定を変更した事と関係があるように思います。FRNU503のBIOSは触らない方が良いでしょう。
8/30追記
「avastop」を導入するだけではダメだったので、その後、調整を行いました。
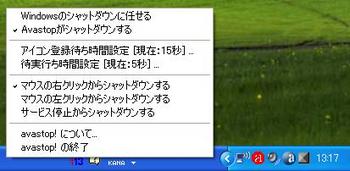
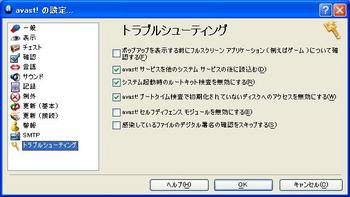
まず、「avastop」の設定を以下のように変更してみました。それでも安定しなかったのでavast側の「トラブルシューティング」設定も以下のように変更してみました。
それ以降は今のところ安定しています。
あと、休止状態にならない事があった件は、avastの問題ではなく、仮想メモリ領域を増やしたら安定するようになりました。
パソコン:FRNU503退院Ⅱ [パソコン]
FRNU503が2週間ぶりに戻ってきました。
今回は前後の配送に時間がかかったのか、
- 7/22(水) ヤマダ電機持ち込み
- 7/28(火) FRONTIERでの預かり日
- 7/30(木) 修理完了
- 8/4(火) ヤマダ電機からの完了連絡
でした。FRONTIERでの修理状況についてはサポートページの「修理状況検索サービス」で確認できるので、ヤマダ電機内での配送状況も確認できるようになって欲しいです。
FRONTIERのサポートページ
http://www.frontier-k.co.jp/direct/support/index.aspx
修理報告書では前回と同じ「マザーボード交換」でしたが、そのままでは家庭内の無線環境に接続できませんでした。MACアドレスを確認すると修理前と変わっていましたので無線LANカード部分も交換したようです。無線LANには登録MACアドレスを変更する事で接続できるようになりました。
ようやく、このブログも再開です。
![【期間限定緊急値下げ!!/即納/送料無料】パソコンがすぐに使いたい!そんなあなたにオススメです!【今だけ、15,000円OFF】使い出したら手放せない!10.1型ミニノート♪家でも仕事でも大活躍!!10.1型ワイド液晶搭載 FRONTIER NUシリーズ エントリーモデル [ 05P03Aug09 ]【PC家電_069P2】【10倍送料無料0803】](https://thumbnail.image.rakuten.co.jp/@0_mall/frontier-k/cabinet/090605/75867_w200_down.gif?_ex=128x128 "【期間限定緊急値下げ!!/即納/送料無料】パソコンがすぐに使いたい!そんなあなたにオススメです!【今だけ、15,000円OFF】使い出したら手放せない!10.1型ミニノート♪家でも仕事でも大活躍!!10.1型ワイド液晶搭載 FRONTIER NUシリーズ エントリーモデル [ 05P03Aug09 ]【PC家電_069P2】【10倍送料無料0803】")
パソコン:FRNU503再入院中 [パソコン]
我が家のFRNU503が再入院中です。
症状は前回と同じく、電源投入後にBIOS画面のところでフリーズするというものです。
最初の予兆は、休止状態にしようとするとエラーで休止状態に入れない事でした。また、たまにシャットダウン時に電源が切れない事もありました。おかしいなと思いつつも使えていたので様子を見ていました。
その後、OS起動直後(画面が表示された後)にフリーズする症状が2度ほど出た後、起動しなくなりました。BIOS設定画面にも遷移できませんでした。
起動時にESCキーを押してチェック状況を確認してみるとCPU,メモリのチェックの後、ハードディスクのチェックの所にくると必ずフリーズ状態になっていました。
早速、7/22(水)にヤマダ電機に持ち込んで2度目の修理依頼をしました。
伝票には「至急 再修理」と書いてもらいましたが、FRONTIERのサポートサイトの修理状況確認ではまだ修理品が登録されていません。山口県の豪雨災害で貨物も届かなくなっているのでしょうか?
パソコン:LogMeInがアンインストール(完全削除)できない [パソコン]
LogMeInは「どこからでも自分のコンピュータへリモート アクセスできる無料サービス」として話題だったので試しに Ver.4.0.784 を導入してみました。
https://secure.logmein.com/go.asp?page=products_free&lang=ja
動作確認して確かにアクセスできることは確認できましたが、当面使う予定がなく、セキュリティホールになると嫌だったのでアンインストールしました。ただ、アンインストールしてもイベントログに
イベントの種類: エラー
イベント ソース: Service Control Manager
イベント カテゴリ: なし
イベント ID: 7000
日付: 2009/07/03
時刻: 23:30:29
ユーザー: N/A
コンピュータ: xxxxxxxx
説明:
LogMeIn Kernel Information Provider サービスは次のエラーのため開始できませんでした:
指定されたパスが見つかりません。
と表示され完全削除できていないようでした。
レジストリエディタを起動して「LogMeIn」で検索すると大量に情報が残っている事がわかりました。1つ1つ関係するものを削除しましたが以下のキーだけが削除できません。
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Enum\Root\LEGACY_LMIINFO
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Enum\Root\LEGACY_LMIRFSCLIENTNP
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Enum\Root\LEGACY_LMIRFSDRIVER
トレンドマイクロ社の下記urlの情報でレジストリキー単位でアクセス許可できることを知り、アクセス許可設定を変更する事でようやく削除が完了しました。
http://jp.trendmicro.com/jp/threat/method-computer/registry/access/index.html
アンインストールが不完全なソフトは信頼できない(十分なテストができていない)と思います。
特にリモートアクセスソフトなのでセキュリティ面でも不安になります。
利用には十分注意した方が良いと感じたソフトでした。
【完全削除方法概要】
※完璧かどうか不明なため概要のみ記載します。
- 通常通りアンインストール
- regeditで「LogMeIn」で検索しながら不要なキーや値を削除/編集(不要の判断に注意)
- 同じく「lmi」で検索しながら不要なキーや値を削除/編集(不要の判断に注意)
- 一旦OS再起動
- ユーザーアカウントにLogMeInRemoteユーザーが現れるので削除(レジストリの特別ユーザー登録を解除すると現れる)
- エクスプローラでWindowフォルダ以下をファイル名「lmi」で検索しながら不要なファイル(dll,sys)を削除(不要の判断に注意)
パソコン:「TROJ_SEEKWEL.TO」ウィルスに感染 [パソコン]
家族のPCがウィルスに感染しました。感染に気づいたの「レジストリエディタが起動できない」事がきっかけでした。起動しようとすると、画面がちらつくだけでレジストリエディタが起動しません(Explorer.exeを強制終了した?時のような動きでした)。
ウィルスチェックソフトとして、無償の「avast! 4 Home Edition」を利用していたのですが感染を防げなかったようです。
下記URLにあるトレンドマイクロ社の「システムクリーナー」を使って修復を実施してみたところ、「TROJ_SEEKWEL.TO」ウィルスへの感染が確認され修復できました。
http://esupport.trendmicro.co.jp/Pages/JP-24700.aspx
【実行結果】
Damage Cleanup Engine (DCE) 6.1(Build 1027) (RCM: Driver not ready!)
Windows XP(Build 2600: Service Pack 3)
Start time : 木 7 16 2009 01:16:57
Load Damage Cleanup Template (DCT) "C:\Documents and Settings\Owner\デスクトップ\auto_tsc\TMRDCT.ptn" (version 999) [success]
Load Damage Cleanup Template (DCT) "C:\Documents and Settings\Owner\デスクトップ\auto_tsc\tsc.ptn" (version 1048) [success]
TROJ_SEEKWEL.TO[virus found]
-->reboot delete file("C:\WINDOWS\system32\..\brckqc.ugs","","") success
-->delete registry value("HKEY_LOCAL_MACHINE","SOFTWARE\Microsoft\Windows NT\CurrentVersion\Drivers32","aux2") success
Complete time : 木 7 16 2009 01:17:18
Execute pattern count(3062), Virus found count(1), Virus clean count(1), Clean failed count(0)
とはいえ、商用のウィルスチェックソフトは買う気はないので定期的に「システムクリーナー」を実行するようにして対応する予定です。

パソコン:FUJITSU BIBLO MG70M/Tのファン掃除 [パソコン]
我が家には2005年に購入したノートPC「FUJITSU BIBLO MG70M/T」が家族用にあります。
もともと発熱量が高く、低温やけどに注意という注意書きがある機種ですが、いつからか、ファンが常に回っている状態になっていました。左側のファンの吹き出し口に手をかざしてみると風を感じなかったので、一度、ファンの状態を確認する事にしました。
ネットの情報でも同型機種の分解方法の説明はなく困りましたが、試行錯誤してファンが確認できるところまで分解する事ができました。
分解してみると、ファンの吹き出し口に"座布団"のようにホコリの固まりがありました。厚さは7mm程度あったように思います。いくらファンが回っても冷えないわけです。それを取り除いてからは幾分は熱さが緩和しましたが、元々熱くなる機種なのでファンがよく回る事には変わりありません。最近はファンの音がうるさいのですが、それにつていは対処方法がわからずそのままにしています。ネット情報でグリスを使えば良いとの投稿もありましたが、どのように使えば良いか不明のため対処していません。
分解方法は2009年9月23日投稿の記事を参考にしてください。
パソコン:FRNU503の評価 [パソコン]
1週間の入院時間を除くと購入してから1ヶ月が過ぎましたのでFRNU503の評価をしてみました。
- 【◎大きさ】持ち運びにはコンパクトで便利。さすがはミニノート。
- 【◎重さ】軽い。足の上で作業しても重さは感じない。
- 【○バッテリ】2時間程度しか持たないが普通という感じ。
- 【△画面】高解像度液晶できれいだが、縦が576しかないので、ブラウザの利用でもOutlook Expressでメール確認でも使いづらい。もう200ぐらいほしかった。
- 【○キーボード】小さすぎるわけでもなく問題なし。
- 【△タッチパッド】マウスとして使うがクリック部分が堅く、操作しにくい。ホイール機能もないのでUSBマウスを接続して利用している。
- 【○熱】ATOMプロセッサという事で消費電力も低く、低温やけどするような熱さにはならない。
- 【○速度】ブラウザ操作やテキスト入力では特に問題なし。動画については、YouTubeのHD画像など高解像度動画ではATOM N270のCPUではパワー不足。コマ落ちが激しく見れたものではない。
結論、2ndパソコンとしては十分な性能で重宝しています。
ソファーの上でパソコン操作するには丁度良い重さとサイズです。
パソコン:FRNU503の解像度 [パソコン]
FRNU503は小さくて便利ですが、画面の解像度だけが気に入りません。
メールを見るにも、ブラウザを使うにも、縦が狭くて見づらいです。
画面下部のタスクバーを自動的に隠す設定にしても使いづらいですし、マウスを下部に持ってくると勝手にタスクバーが表示されるのが鬱陶しいのです。
IEについてはF11キーを押して最大化すると見やすくなりますがマウスが上方に来るとメニューが現れるのが鬱陶しいです。
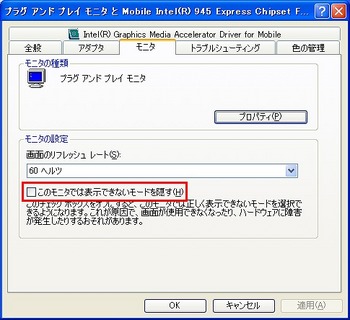
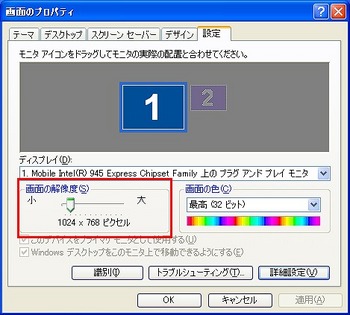
標準では、1024×576の解像度で縦方向が狭いです。プログラムによっては解像度が800×600以上かどうかをチェックするものもあって、そのままではインストールできない事もあります(下記の方法で一時的に解像度を上げて導入する事になります)。
そこで、解像度を1024×768に変更して使う事にしました。768にすると上下部分の一部が表示されませんが、マウスを上端や下端に持ってくると表示されていない部分に移動できるので、隠れている部分が200弱程度なら、それ程苦になりません。200弱程度は、丁度ブラウザ等のメニューが隠れる程度なので、コンテンツを確認するには丁度良いです。
<設定方法>
![【激安】アウトレットPC【送料無料】FRONTIER アウトレットノートPC FRNU302/M [ XP Home / Atom N270 / 1GB /120GB / 10.2型 ] 【PC家電_057P2】【PC家電_058P2】](https://thumbnail.image.rakuten.co.jp/@0_mall/frontier-k/cabinet/outlet_mall/76294_w200_.gif?_ex=128x128 "【激安】アウトレットPC【送料無料】FRONTIER アウトレットノートPC FRNU302/M [ XP Home / Atom N270 / 1GB /120GB / 10.2型 ] 【PC家電_057P2】【PC家電_058P2】")
ロボット:ビーチフラッグに挑戦 [KCB-2]
ロボコンマガジン2009年7月号の記事をみて、近藤科学のサイトからビーチフラッグのサンプルプログラムを入手しました。(ココからダウンロード)
サンプルは受信センサが2個装着されている事が前提となっていましたが作成したフォークリフトには1個しかついていません。そこでプログラムを変更して1個で旋回しながら送信センサ位置を探すようにしました。具体的には、旋回しながら受信センサを読み取り、現在の測定値と直前の測定値を利用して送信センサの位置を探すように変更しました。
【最初のバージョン】
とりあえず送信センサには近づくようになりました。2m以内なら送信センサを検出できる様子です。ただ、探査時は常に右旋回で、サンプルにあった左右のセンサ値(今回は現在の測定値と直前の測定値)によって旋回方向を切り替える処理には入らないように見えました。そこで、その部分は削除して直前の測定値が範囲内で現在の測定値がLOST値の時に逆旋回するようにしました。また、受信センサが右端にあると送信センサの正面で止まれないため写真のように真ん中に移動しました。

【次のバージョン】
受信センサを真ん中にしたので正面で停止するようになりましたが、相変わらず探査時に逆旋回しませんでした。片方だけが範囲外になる確率が低いのだと思います。そこで、探査終了時の直進が始まる前に次の旋回は逆になるよう旋回方向を指定する変数を追加する事にしました。
【本日の最終版】
フォークリフトは後輪が1つしかないので直進性が悪いです。右旋回後だと右へ、左旋回後だと左へ流れて進む事が多いです。ただ、送信センサをロストして再探査する際は必ず逆旋回して探査するようになったので無駄な旋回が減り、短時間で送信センサに近づくようになりました。本日はここまでとします。
<本日のサンプルプログラム>
/***********************************************************************/
/* */
/* FILE :forklift.c */
/* DATE :Thu, Jun 11, 2009 */
/* DESCRIPTION :main program file. */
/* CPU GROUP :27 */
/* */
/* This file is generated by Renesas Project Generator (Ver.4.15). */
/* */
/***********************************************************************/
//
// ビーチフラッグの自律プログラムです。
// ・近藤科学からダウンロードした「KCB2_Lesson2.c」のサンプルプログラム
// を参考にしています。
// ・受信センサが1つのため、その点を改良しています。
// 車体はフォークリフト(タミヤ工作キット)です。
//
// 動作概要は次の通りです。
// ・まず旋回しながら送信センサ位置を探査します。
// ・送信センサが見つかったら前進します。
// ・送信センサをロストすると旋回探査に入ります。
// ・旋回探査から抜ける時に次の旋回探査は逆旋回するようにしています。
// ・送信センサに近づく(測定値420以上になる)と停止します。
//
// 端子の接続
// MOTER1 - 本体移動用モーター(左)
// MOTER2 - 本体移動用モーター(右)
// AD4 - 超音波センサー(USRX-1)
//#include <pwm.h>
#include <led.h>
#include <ad.h>#define LOST 200
void main(void)
{
_Bool t_sw = 0; // ターン方向の変数:初期値は右旋回
int adv1, adv2, adv_dif; // センサ値(現在と直前)とその差の変数
// 初期化
cpu_init(); // CPU
pwm_init(); // PWM
ad_init(); // ADledred_on();adv2 = ad_read(4); // 直前のセンサ値変数を現在の測定値で初期化while(1) {adv1 = ad_read(4); // 現在のセンサ値を読み取り// 目標が正面にいる場合
if((adv1 < 420) && (adv1 >= LOST) && (adv2 < 420) && (adv2 >= LOST)){
adv_dif = adv1 - adv2;
// 直前のセンサ値との誤差が10前後のときは前進
if((adv_dif <= 25)&&(adv_dif >=-25)){
pwm1 ( 70,FWD); // Duty 50%の正転動作を設定します
pwm2 ( 70,FWD);
}
}
// 直前のセンサ値だけが範囲内なら逆旋回
else if((adv2 < 420) && (adv2 >= LOST)){
if(t_sw == 1){ // 旋回方向判断
pwm1 ( 70,BAK); // 左旋回
pwm2 ( 70,FWD);
}
else{
pwm1 ( 70,FWD); // 右旋回
pwm2 ( 70,BAK);
}
}// 目標を見失ったと判断した場合
else if((adv1 < LOST) || (adv2 < LOST)){
// 直前と現在のセンサ値がLOSTを超えるまで旋回し続ける
while(1){
if(t_sw == 1){ // 旋回方向判断
pwm1 ( 70,BAK); // 左旋回
pwm2 ( 70,FWD);
}
else{
pwm1 ( 70,FWD); // 右旋回
pwm2 ( 70,BAK);
}
wait( 30000 );
pwm1 ( 0,BRK); // 一時停止
pwm2 ( 0,BRK);
wait( 100000 );
adv1 = ad_read(4);
if ((adv1 > LOST) && (adv2 > LOST)){ // LOST値以上になったかを判断
if(t_sw == 1){ // 次の旋回方向を指定
t_sw = 0; // 次は右旋回
}
else{
t_sw = 1; // 次は左旋回
}
break;
}
adv2 = adv1; // 直前のセンサ値変数を更新
}
}
// もし目標が近くにいた場合
else{
pwm1 ( 0,BRK); // 閾値420を超えたら停止
pwm2 ( 0,BRK);
}
adv2 = adv1; // 直前のセンサ値変数を更新
}
}

")
- ショップ: グラスロードカンパニー
- 価格: 6,300 円
![ロボコンマガジン 2009年 07月号 [雑誌]](https://thumbnail.image.rakuten.co.jp/@0_mall/book/cabinet/jan_4910097/4910097610791.jpg?_ex=128x128 "ロボコンマガジン 2009年 07月号 [雑誌]")
- ショップ: 楽天ブックス
- 価格: 980 円



